2020作品
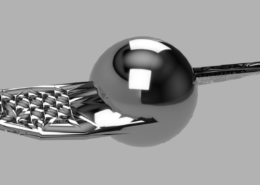
海馬骨架仿生漁網處理器
作品簡介
海底廢棄漁網是海洋生態的一大威脅,根據了解,目前是派遣人力下潛海床、手持器具挑起漁網,再用船上垂下的鉤子鉤住漁網,以漁船牽引使漁網浮起,但這種處理方式對於潛水員有潛在的安全問題,以及鉤子施力點不均容易脫鉤、扯斷漁網。因此,我們仿照自然界生物體捲繞的構造,設計可控、施力更加均勻的機械漁網鉤,避免人員下水需要冒的風險。比較自然界許多生物能捲曲的構造後,我們最後選擇以海馬尾巴進行仿生。其特殊的方柱型尾巴,較圓柱型纏繞時具有更大的接觸面積、更加牢靠、更靈活。另外,我們會在這個仿生漁網鉤上,再加入影像辨識的功能,達到遠端監視、不須派人親自下潛、精確纏繞到廢棄漁網而非礁石或其他生物體的功能。