2023作品
玄鳥與飛奴-仿生拍撲翼應用於道路橋樑檢測
作品簡介
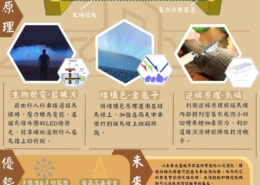
撲翼機為仿生學的實際應用,其驅動方式區分為兩種,一種以齒輪等連桿機構完成拍翅周期,另一種是以伺服馬達精準控制拍撲、旋轉及掃略來模仿鳥類拍翅的方式。在經過測試後,我們採用伺服馬達達到更輕,更有效率的完成翅膀揮動,並以高速計算機的演算及流場模擬的測試測試出最有飛行效率的拍翅幅度及頻率,藉以作為仿生撲翼機構設計參考,有效地提高飛行性能。在飛行控制方面,使用Arduino Pro Mini Board為飛控控制中樞,上傳不同的編碼以完成各種飛行姿態控制,如透過遙控器的油門控制拍翼的幅度以達到不同的推力,通過機翼的動態調整和控制面(如擺動翼尖和尾翼)來實現姿態控制及不同飛行模式的操控。結合伺服馬達、電調、接收器等電裝,以命令動作所構成的控制裝置,可以精確控制振翅的大小、擺幅、頻率,做到良好的飛行操控完成撲翼機雛形配置。
此外,模仿鴿子頭部影像減震的方式,其透過頸部彈性的平衡策略,在移動位置時,視覺能有最穩定的效果,我們選擇採用彈性結構雲台,透過基本的機械原理如迫緊,放鬆的阻尼,四個彈性裝置抵銷縱向的震動來達到最好的減震效果。遠程視覺檢查(Remote Visual Inspection, RVI),透過透過人工智慧及機器訓練的演算法,讓微電腦能夠達到精確識別目標任務的效果。